
شبیه سازی ماشین های الکتریکی در متلب (و کنترل آنها)


شبیهسازی ماشینهای الکتریکی یکی از ابزارهای کلیدی در طراحی، تحلیل و بهینهسازی سیستمهای صنعتی و مهندسی است. ماشینهای الکتریکی به عنوان قلب تپنده بسیاری از صنایع، از حمل و نقل و تولید تا انرژی و خودروسازی، نقش حیاتی ایفا میکنند. با توجه به پیچیدگیهای دینامیکی و عملکردی این ماشینها، شبیهسازی دقیق آنها به مهندسان امکان میدهد تا پیش از ساخت فیزیکی، تمامی جنبههای عملکردی، بازدهی و پایداری سیستمها را بررسی و بهینه کنند. متلب، به عنوان یک محیط قدرتمند و چندمنظوره در حوزه محاسبات عددی و شبیهسازی، امکانات گستردهای برای مدلسازی و شبیهسازی ماشینهای الکتریکی فراهم میکند. استفاده از متلب نه تنها دقت و سرعت تحلیلها را افزایش میدهد، بلکه به طراحان اجازه میدهد تا در مراحل اولیه توسعه، مشکلات احتمالی را شناسایی و راهحلهای مناسب را اجرا کنند. این امر باعث کاهش هزینهها و زمان توسعه پروژهها میشود و در نهایت به بهبود کیفیت و عملکرد محصولات نهایی منجر میگردد.
شبیهسازی در متلب
شبیهسازی یکی از مهمترین ابزارهای مهندسی است که برای مدلسازی و تحلیل سیستمهای پیچیده به کار میرود. متلب (MATLAB) به عنوان یکی از قدرتمندترین نرمافزارهای مهندسی، امکانات گستردهای برای شبیهسازی و تحلیل سیستمهای مختلف از جمله ماشینهای الکتریکی فراهم میکند. شبیهسازی در متلب به دو صورت انجام میشود: استفاده از کدهای متلب و محیط گرافیکی سیمولینک. هر دوی این روشها قابلیتهای منحصر به فردی برای مدلسازی، شبیهسازی و تحلیل سیستمها دارند. استفاده از متلب و سیمولینک، مهندسان را قادر میسازد تا بدون نیاز به ساخت فیزیکی، سیستمهای الکتریکی و مکانیکی پیچیده را مدلسازی و عملکرد آنها را تحلیل کنند. این قابلیتها نه تنها زمان و هزینهها را کاهش میدهند، بلکه دقت و کیفیت طراحیها را نیز به طور چشمگیری افزایش میدهند.
محیط سیمولینک:
سیمولینک (Simulink)، به عنوان یکی از ابزارهای جانبی متلب، یک محیط گرافیکی و مبتنی بر بلوک برای مدلسازی، شبیهسازی و تحلیل سیستمهای دینامیکی فراهم میکند. سیمولینک به دلیل ساختار بلوکی و محیط کاربرپسند، به ویژه برای مدلسازی سیستمهای پیچیدهای مانند ماشینهای الکتریکی، کنترلکنندهها و سیستمهای مکانیکی مورد استفاده قرار میگیرد. در سیمولینک، کاربران میتوانند با استفاده از بلوکهای آماده و یا تعریف بلوکهای سفارشی، سیستمهای مورد نظر خود را بسازند.
سیمولینک به کاربران امکان میدهد که به راحتی مدلهای خود را با استفاده از ابزارهای گرافیکی ایجاد و اصلاح کنند. یکی از مزایای اصلی سیمولینک، تعامل مستقیم با متلب است؛ به این صورت که کاربران میتوانند نتایج شبیهسازیها را مستقیماً به محیط متلب منتقل کرده و از توابع متلب برای تحلیل و پردازش نتایج استفاده کنند. علاوه بر این، سیمولینک به دلیل قابلیت یکپارچهسازی با دیگر ابزارهای متلب مانند Simscape و Simulink Coder، امکان مدلسازی سیستمهای چندفیزیکی و حتی تبدیل مدلها به کدهای اجرایی را نیز فراهم میکند. این ویژگیها سیمولینک را به یکی از قدرتمندترین ابزارهای شبیهسازی در زمینه مهندسی تبدیل کرده است.
بلوکهای آماده برای مدلسازی ماشینهای الکتریکی:
سیمولینک علاوه بر محیط گرافیکی پیشرفتهای که برای مدلسازی فراهم میکند، مجموعهای از بلوکهای آماده را نیز برای شبیهسازی ماشینهای الکتریکی و سیستمهای مرتبط ارائه میدهد. این بلوکها، که در کتابخانههای مختلف سیمولینک مانند Simscape Electrical قرار دارند، امکان مدلسازی سریع و دقیق اجزای مختلف ماشینهای الکتریکی را فراهم میکنند. برای مثال، بلوکهایی برای مدلسازی موتورهای DC، موتورهای القایی، ترانسفورماتورها، ژنراتورها و سایر اجزای الکتریکی و مکانیکی در دسترس هستند.
بلوکهای از پیش تعریف شده، به کاربران این امکان را میدهند که به جای صرف زمان برای نوشتن کدهای پیچیده، به سادگی این بلوکها را به مدل خود اضافه کرده و پارامترهای مورد نظر را تنظیم کنند. این بلوکها معمولاً شامل پارامترهایی مانند مقاومت، اندوکتانس، گشتاور، ولتاژ و جریان هستند که میتوانند برای شبیهسازی دقیق ماشینهای الکتریکی به کار روند. علاوه بر این، سیمولینک قابلیت اتصال این بلوکها به سایر سیستمهای کنترلی و مکانیکی را نیز فراهم میکند، که به کاربران این امکان را میدهد که سیستمهای چند دامنهای را به طور کامل شبیهسازی کنند.
نوشتن کدهای متلب برای مدلسازی سفارشی
اگرچه استفاده از بلوکهای آماده در سیمولینک برای شبیهسازی ماشینهای الکتریکی بسیار کارآمد است، اما در برخی موارد، نیاز به مدلسازی سفارشی و خاص با استفاده از کدهای متلب وجود دارد. این روش به ویژه زمانی مورد استفاده قرار میگیرد که ماشین الکتریکی مورد نظر دارای ویژگیها و پارامترهای منحصر به فردی باشد که در بلوکهای آماده سیمولینک به خوبی پوشش داده نشده است.
برای مدلسازی سفارشی، میتوان معادلات ریاضی که رفتار دینامیکی ماشین الکتریکی را توصیف میکنند، به صورت مستقیم در متلب کدنویسی کرد. به عنوان مثال، یک موتور DC را میتوان با استفاده از معادلات ولتاژ و گشتاور و با استفاده از تابع ode45 در متلب شبیهسازی کرد. این تابع امکان حل معادلات دیفرانسیل غیرخطی را فراهم میکند و میتواند برای تحلیل پاسخ گذرا و پایدار ماشین الکتریکی به کار رود.
در چنین شرایطی، ابتدا معادلات حاکم بر سیستم به صورت یک تابع در متلب تعریف میشوند و سپس با استفاده از روشهای عددی مانند روش رانگ-کوتا (Runge-Kutta)، شبیهسازی انجام میشود. این روش به مهندسان امکان میدهد تا مدلهای دقیقی از ماشینهای الکتریکی با مشخصات خاص ایجاد کنند و رفتار سیستم را در شرایط مختلف مورد بررسی قرار دهند. به عنوان مثال، اگر بخواهیم اثر تغییر پارامترهایی مانند مقاومت یا اندوکتانس را بر روی عملکرد موتور بررسی کنیم، میتوانیم این پارامترها را در کد تغییر داده و نتایج شبیهسازی را مشاهده کنیم.
نتایج شبیهسازی
پس از اجرای شبیهسازی در متلب یا سیمولینک، نتایج به دست آمده مورد تحلیل و ارزیابی قرار میگیرند. این نتایج معمولاً شامل پاسخهای گذرا و پایدار، مشخصههای عملکردی و مقایسه با دادههای تجربی هستند که میتوانند در تصمیمگیریهای مهندسی و بهبود طراحیها مورد استفاده قرار گیرند.
تحلیل پاسخهای گذرا و پایدار
یکی از مهمترین بخشهای تحلیل نتایج شبیهسازی، بررسی پاسخهای گذرا و پایدار سیستم است. پاسخ گذرا به تغییرات ناگهانی ورودیها یا شرایط اولیه سیستم اشاره دارد و معمولاً شامل نوسانات و رفتارهای غیردائمی است که پس از مدتی به یک وضعیت پایدار منجر میشود. برای ماشینهای الکتریکی، این پاسخها میتوانند شامل تغییرات سرعت، جریان، گشتاور و ولتاژ در لحظات اولیه پس از اعمال ولتاژ یا بار باشند.
تحلیل پاسخهای گذرا میتواند اطلاعات بسیار مهمی را در مورد پایداری و رفتار دینامیکی سیستم فراهم کند. به عنوان مثال، اگر سیستم پس از اعمال یک ورودی به سرعت به وضعیت پایدار نرسد یا نوسانات زیادی داشته باشد، ممکن است نشاندهنده نیاز به بهبود در طراحی کنترلر یا پارامترهای ماشین باشد. بررسی پاسخهای گذرا و پایدار به مهندسان این امکان را میدهد که عملکرد ماشینهای الکتریکی را در شرایط مختلف ارزیابی کرده و تغییرات لازم را اعمال کنند.
تعیین مشخصههای عملکردی
پس از تحلیل پاسخهای گذرا و پایدار، نوبت به تعیین مشخصههای عملکردی ماشین الکتریکی میرسد. این مشخصهها شامل پارامترهایی مانند گشتاور، سرعت، جریان و بازده هستند که نقش کلیدی در ارزیابی عملکرد سیستم ایفا میکنند. این مشخصهها معمولاً با استفاده از نتایج شبیهسازی و از طریق پردازش دادهها در متلب محاسبه میشوند.
به عنوان مثال، برای محاسبه بازده یک موتور الکتریکی، میتوان نسبت توان خروجی مفید به توان ورودی را محاسبه کرد. همچنین، گشتاور و سرعت به عنوان دو مشخصه اصلی در عملکرد ماشینهای الکتریکی، میتوانند از طریق تحلیل دادههای شبیهسازی به دست آیند. تعیین دقیق این مشخصهها به مهندسان امکان میدهد که کیفیت و کارایی ماشین الکتریکی را ارزیابی کنند و در صورت لزوم بهینهسازیهای لازم را انجام دهند.
مقایسه نتایج شبیهسازی با نتایج تجربی
مقایسه نتایج شبیهسازی با نتایج تجربی یک گام حیاتی در فرآیند شبیهسازی است. این مقایسه به مهندسان امکان میدهد تا اعتبارسنجی مدل را انجام دهند و اطمینان حاصل کنند که مدل شبیهسازی شده به درستی رفتار واقعی سیستم را منعکس میکند. اگر نتایج شبیهسازی با نتایج تجربی همخوانی داشته باشند، میتوان اطمینان حاصل کرد که مدل ایجاد شده به اندازه کافی دقیق است و میتوان به نتایج آن اعتماد کرد.
در غیر این صورت، ممکن است نیاز به بازنگری در مدلسازی و اصلاح پارامترهای مدل وجود داشته باشد. این فرآیند اعتبارسنجی نه تنها دقت مدل را افزایش میدهد، بلکه به شناسایی عوامل ناشناخته و بهبود طراحیها نیز کمک میکند. این مقایسه معمولاً با استفاده از نمودارها و مقایسه عددی بین نتایج شبیهسازی و دادههای تجربی انجام میشود.
کاربردهای شبیهسازی
شبیهسازی ماشینهای الکتریکی در متلب و سیمولینک دارای کاربردهای گستردهای در طراحی، تحلیل و بهینهسازی سیستمها است. این کاربردها شامل طراحی سیستمهای کنترل، بهینهسازی طراحی و آزمایش سناریوهای مختلف است که هر یک نقش مهمی در بهبود عملکرد ماشینهای الکتریکی و سیستمهای مرتبط دارند.
طراحی سیستمهای کنترل
یکی از کاربردهای اصلی شبیهسازی ماشینهای الکتریکی، طراحی سیستمهای کنترل است. با استفاده از شبیهسازی، مهندسان میتوانند کنترلرهای مختلف مانند PID، کنترلرهای تطبیقی و کنترلرهای مدرن را برای بهبود عملکرد ماشینهای الکتریکی طراحی و آزمایش کنند. شبیهسازی به مهندسان این امکان را میدهد که بدون نیاز به ساخت فیزیکی سیستم، انواع مختلف کنترلرها را بر روی مدل شبیهسازی شده آزمایش کرده و بهترین گزینه را انتخاب کنند.
به عنوان مثال، برای کنترل سرعت یک موتور DC، میتوان از کنترلر PID استفاده کرد و با تغییر پارامترهای آن، بهینهترین حالت را پیدا کرد. شبیهسازی همچنین به مهندسان امکان میدهد تا عملکرد کنترلرها را در شرایط مختلف بار و ورودی ارزیابی کنند و پایداری و دقت سیستم را بررسی کنند.
بهینهسازی طراحی
بهینهسازی طراحی یکی دیگر از کاربردهای مهم شبیهسازی ماشینهای الکتریکی است. با استفاده از شبیهسازی، مهندسان میتوانند پارامترهای مختلف طراحی مانند ابعاد فیزیکی، جنس مواد، پارامترهای الکتریکی و شرایط عملکرد را بهینهسازی کنند تا به عملکرد مطلوب دست یابند. این فرآیند بهینهسازی میتواند شامل بهبود بازده، کاهش تلفات، افزایش گشتاور یا بهبود پایداری باشد.
در محیط متلب، ابزارهای مختلفی مانند Optimization Toolbox برای بهینهسازی طراحی در دسترس هستند. این ابزارها به مهندسان امکان میدهند که با تعریف تابع هدف و قیود مختلف، فرآیند بهینهسازی را به صورت خودکار انجام دهند و بهترین پارامترهای طراحی را پیدا کنند. بهینهسازی طراحی به ویژه در مراحل ابتدایی توسعه محصول، نقش مهمی در کاهش هزینهها و بهبود کیفیت نهایی دارد.
دانلود کنید که دیگه گیرتون نمیاد! حل چند معادله چند مجهول در متلب (روش ساده و نکات)
آزمایش سناریوهای مختلف
شبیهسازی به مهندسان این امکان را میدهد که سناریوهای مختلف کاری را بدون نیاز به آزمایشهای پرهزینه و زمانبر، مورد بررسی قرار دهند. این سناریوها میتوانند شامل تغییرات در شرایط بار، ورودیهای متفاوت، عوامل محیطی مانند دما و رطوبت، و حتی خطاها و نقصهای احتمالی باشند. با شبیهسازی این شرایط، مهندسان میتوانند عملکرد ماشین الکتریکی را در مواجهه با این شرایط ارزیابی کرده و آمادگی سیستم را برای شرایط واقعی سنجیده و بهینه کنند.
به عنوان مثال، در شبیهسازی یک موتور القایی، میتوان شرایط مختلف بار و تغییرات ولتاژ را شبیهسازی کرد و اثرات آنها را بر روی عملکرد موتور بررسی کرد. همچنین، شبیهسازی میتواند به شناسایی نقاط ضعف و نقصهای احتمالی در طراحی کمک کند و راهحلهای مناسب برای بهبود عملکرد سیستم را ارائه دهد. این توانایی در پیشبینی عملکرد ماشینهای الکتریکی در شرایط واقعی، به مهندسان کمک میکند تا طراحیهای خود را بهینهسازی کرده و از عملکرد مطمئن و پایدار سیستمها در طول عمر آنها اطمینان حاصل کنند.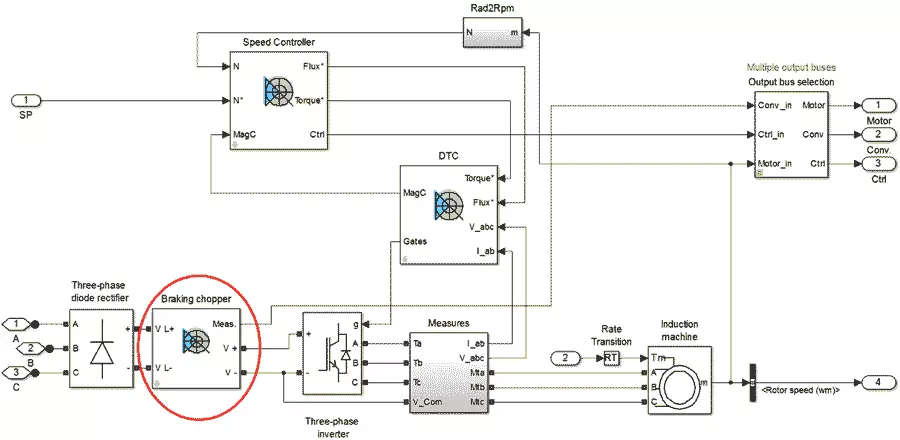
دانلود کنید که دیگه گیرتون نمیاد! آموزش کامل برنامه نویسی در متلب (22 جلسه رایگان به زبان فارسی)
نحوه شبیهسازی یک ماشین DC ساده
شبیهسازی ماشینهای الکتریکی در متلب شامل مدلسازی و پیادهسازی ریاضی و الکتریکی ماشینها مانند موتورهای DC، موتورهای القایی، و ژنراتورها است. در اینجا به طور مختصر نحوه شبیهسازی یک ماشین DC ساده را در متلب توضیح میدهم.
1. مدلسازی ریاضی ماشین DC:یک موتور DC را میتوان با معادلات زیر مدلسازی کرد:
- معادله ولتاژ آرمیچر:
که در آن
- aV ولتاژ اعمالی به آرمیچر
- aL اندوکتانس آرمیچر
- aR مقاومت آرمیچر
- ai جریان آرمیچر
- bE نیروی ضدمحرکه (Back EMF) است
نیروی ضد محرکه 
که در آن
- ek ثابت نیروی ضد محرکه
- سرعت زاویه ای موتور است.
معادله گشتاور
که در آن:
- T گشتاور تولید شده
- tk ثابت گشتاور است.
معادله دینامیکی موتور:
که در آن:
- J ممان اینرسی
- Bضریب اصطکاک
- LT گشتاور بار است.
2. شبیهسازی در متلب:
برای شبیهسازی موتور DC در متلب، مراحل زیر را دنبال کنید:
- ایجاد مدل سیمولینک:
- سیمولینک را باز کنید: simulink را در خط فرمان متلب وارد کنید.
- از بلوکهای موجود در کتابخانه سیمولینک برای پیادهسازی معادلات استفاده کنید.
- معادله ولتاژ آرمیچر را با استفاده از بلوکهای انتگرالگیر و جمعکننده پیاده کنید.
- نیروی ضد محرکه و گشتاور را با استفاده از بلوکهای ضربکننده ایجاد کنید.
- معادله دینامیکی موتور را نیز با استفاده از بلوکهای مناسب پیادهسازی کنید.
- پس از پیادهسازی مدل، پارامترهای سیستم را تنظیم کنید.
- زمان شبیهسازی و سایر تنظیمات را مشخص کنید.
- شبیهسازی را اجرا کنید و نتایج مانند سرعت موتور و جریان آرمیچر را بررسی کنید.
آموزش نکات پایه ای و مهم سیمولینک در نرم افزار متلب
3. کد متلب:
در صورتی که ترجیح میدهید مدل را به صورت برنامه نویسی در متلب شبیهسازی کنید، میتوانید از کد زیر استفاده کنید:
% پارامترهای موتور
Ra = 1; % مقاومت آرمیچر
La = 0.5; % اندوکتانس آرمیچر
Ke = 0.01; % ثابت نیروی ضد محرکه
Kt = 0.01; % ثابت گشتاور
J = 0.01; % ممان اینرسی
B = 0.001; % ضریب اصطکاک
% پارامترهای شبیهسازی
Va = 10; % ولتاژ اعمالی به آرمیچر
TL = 1; % گشتاور بار
tspan = [0 10]; % بازه زمانی شبیهسازی
initial_conditions = [0; 0]; % شرایط اولیه [Ia; omega]
% معادله دیفرانسیل سیستم
motor_eq = @(t, x) [(-Ra*x(1) - Ke*x(2) + Va)/La; ...
(Kt*x(1) - B*x(2) - TL)/J];
% حل معادله دیفرانسیل
[t, sol] = ode45(motor_eq, tspan, initial_conditions);
% استخراج نتایج
Ia = sol(: , 1); % جریان آرمیچر
omega = sol(: , 2); % سرعت زاویهای موتور
% نمایش نتایج
figure;
subplot(2, 1, 1);
plot(t, Ia);
title('Armature Current');
xlabel('Time (s)');
ylabel('Ia (A)');
subplot(2, 1, 2);
plot(t, omega);
title('Motor Speed');
xlabel('Time (s)');
ylabel('Omega (rad/s)');
حتما بخوانید: ریشه یابی در متلب با 5 روش مختلف+ ویدیوی آموزشی
نتیجه گیری
در این تحقیق به بررسی جامع شبیهسازی ماشینهای الکتریکی در محیط متلب و سیمولینک پرداخته شد و نقش حیاتی آن در طراحی، تحلیل و بهینهسازی این ماشینها برجسته شد. شبیهسازی با استفاده از متلب، با ارائه ابزارهای قدرتمند و انعطافپذیر، امکان ارزیابی دقیق عملکرد ماشینهای الکتریکی را فراهم میآورد. با این حال، محدودیتهایی نظیر دقت مدلسازی، وابستگی به دادههای ورودی دقیق و پیچیدگیهای عددی میتواند بر صحت نتایج تأثیر بگذارد. با این وجود، شبیهسازی همچنان یکی از ارکان اساسی در توسعه فناوریهای جدید و بهبود مستمر عملکرد ماشینهای الکتریکی است و به کاهش هزینهها و افزایش کارایی در صنعت کمک شایانی میکند.